IEC104
驱动配置
配置样例如下(可在模型或资产的 设备配置 中进行配置)
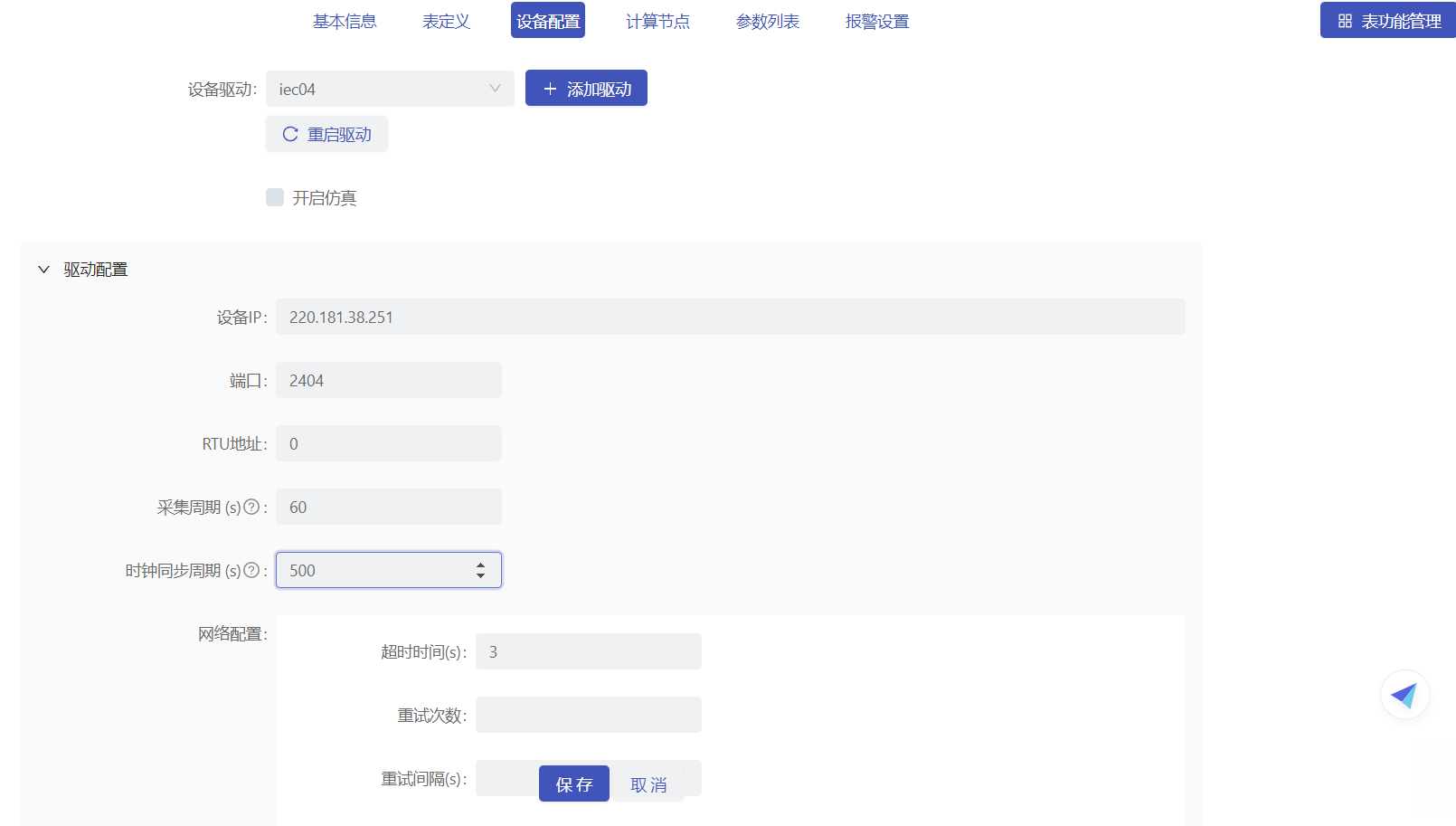 设备IP:设备的真实IP,例子这里设置为220.181.38.251,请根据真实的设备配置情况进行配置
端口:一般为2404,具体情况根据真实的设备配置的端口来
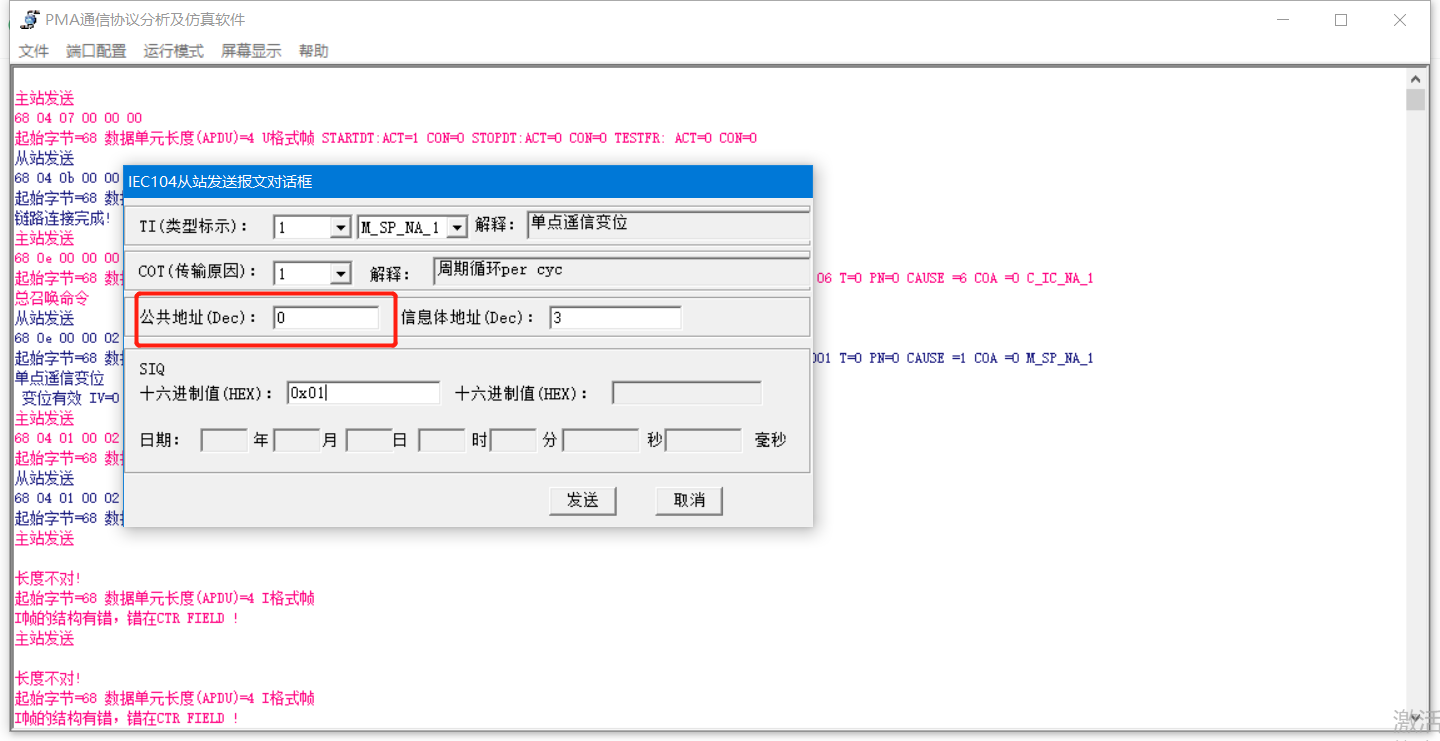
RTU地址:为数据上数时的公共地址,如下图,请根据真实的设备配置情况进行配置
设备IP:设备的真实IP,例子这里设置为220.181.38.251,请根据真实的设备配置情况进行配置
端口:一般为2404,具体情况根据真实的设备配置的端口来
RTU地址:为数据上数时的公共地址,如下图,请根据真实的设备配置情况进行配置
 采集周期 (s) 默认为15分钟,例子这里设置为60秒
时钟同步周期 (s) 默认为15分钟,例子这里设置为500秒
采集周期尽量不要与时钟同步周期出现同时执行的情况,因为时钟同步时会打断数据采集
采集周期 (s) 默认为15分钟,例子这里设置为60秒
时钟同步周期 (s) 默认为15分钟,例子这里设置为500秒
采集周期尽量不要与时钟同步周期出现同时执行的情况,因为时钟同步时会打断数据采集
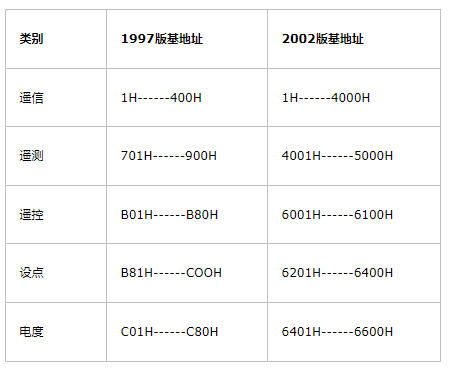
注意104协议规定的寄存器起始地址为十六进制,需要转换成十进制进行填写。
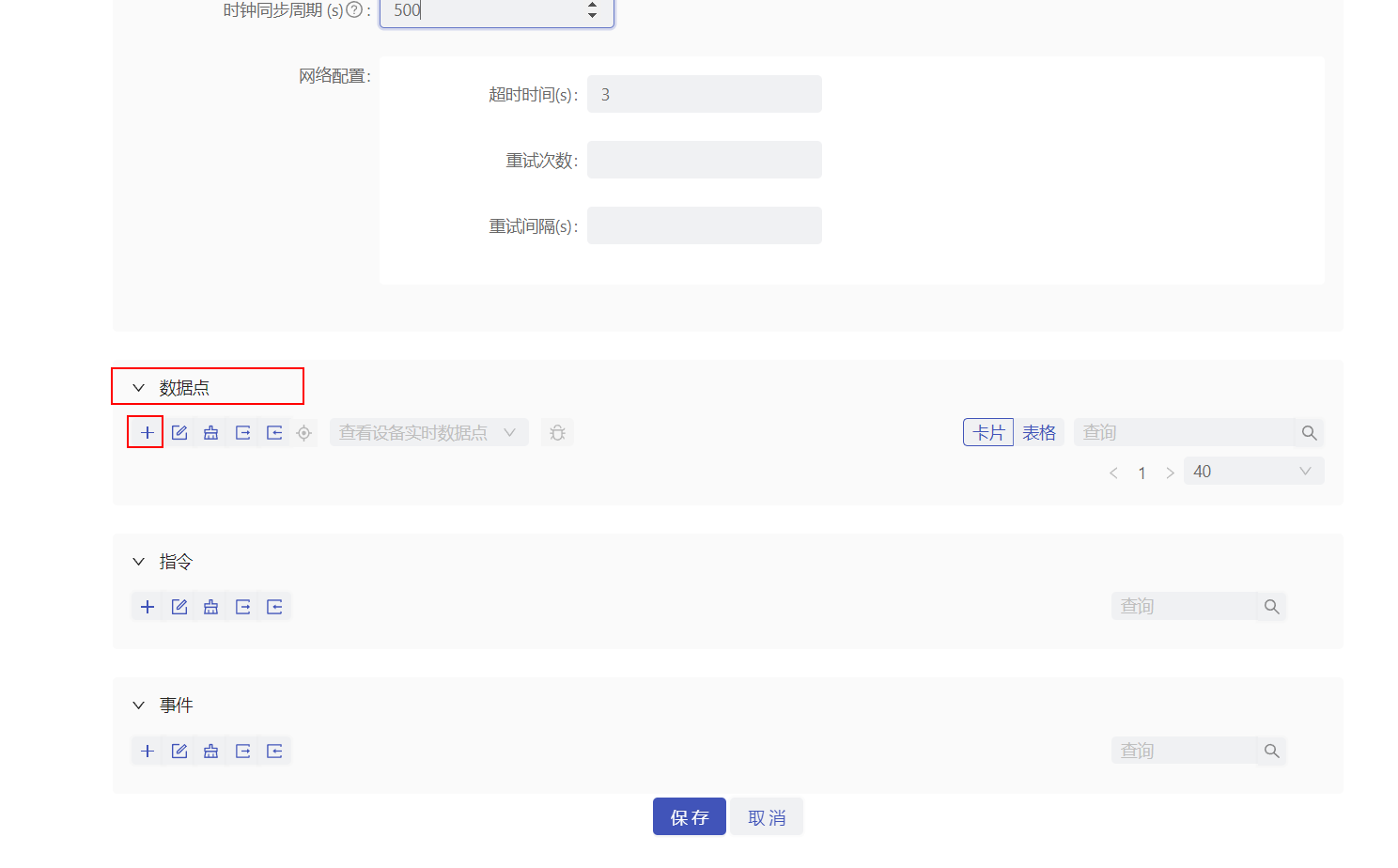
数据点配置
数据点可配置字段为名称(name),标识(id),类型ID(typeid),地址(address)
配置样例如下
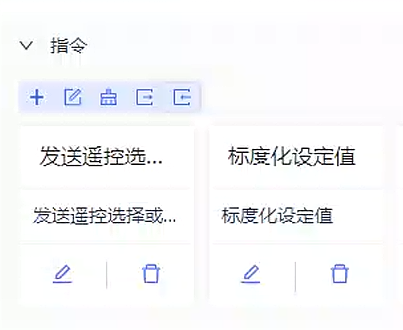
 数据点添加方式如下图提示
数据点添加方式如下图提示
各个字段说明
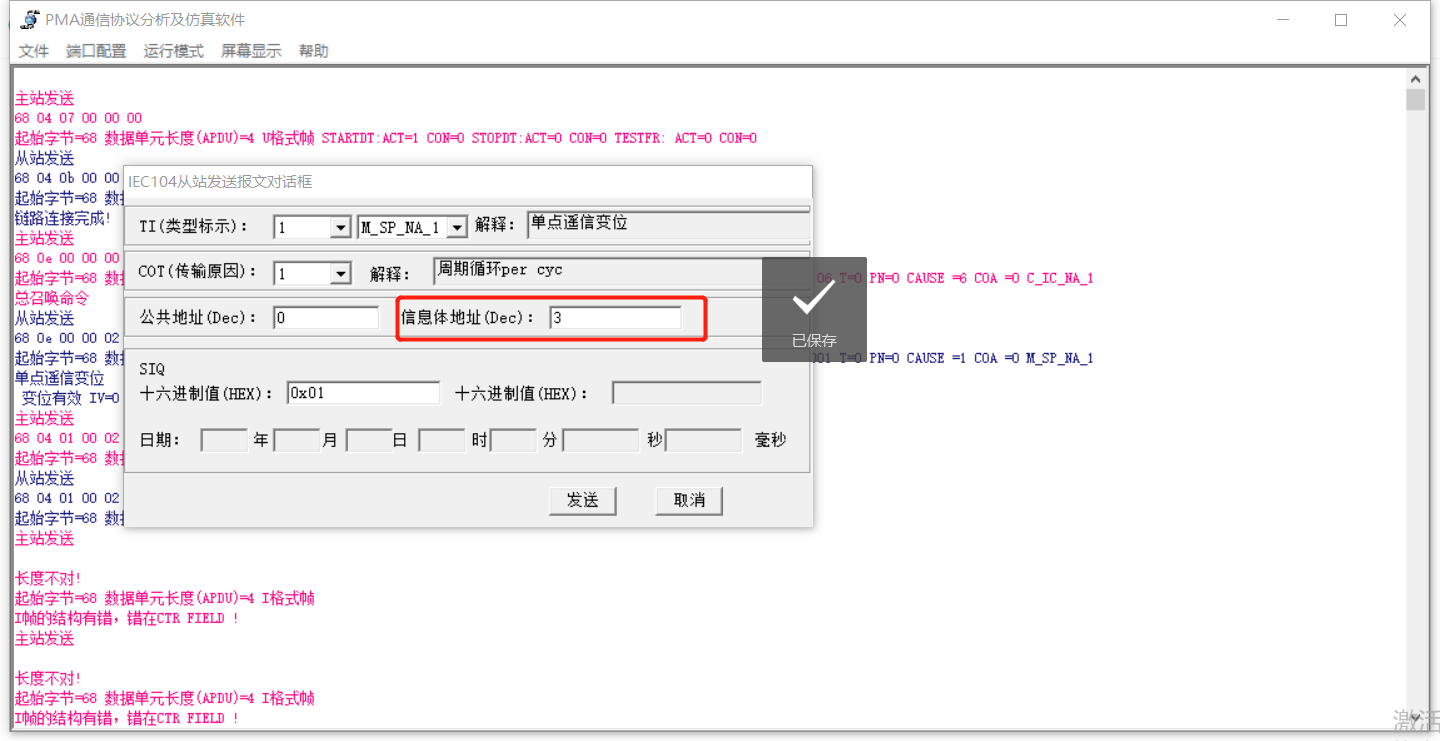
举例使用的数据报文为68 0e 00 00 02 00 01 01 01 00 00 00 03 00 00 01
类型ID
配置中的“类型ID”对应下图设备数据点的类型标示 具体类型例如1是单点遥信,9是单点遥测,其余同理,均与104协议中一致 例子中是1

地址
配置中的“地址”对应下图设备数据点的信息体地址
例子中是3
指令(一般不需要看这部分,用不到)
平台会自带配置好指令,下面格式中name是指令名称,params是指令参数
1.发送对时报文
{
"name": "发送对时报文"
}
2.发送遥控选择/执行
{
"name": "发送遥控选择/执行",
"params": {
"pointNo": 1,
"commandType": 1,
"controlType": 0
}
}
commandType 0为遥控执行命令,1为遥控选择命令 controlType 双点遥控2为合,1为分。单点遥控1为合,0为分。升降遥控时1代表降档,2代表升档
指令配置示例如下:
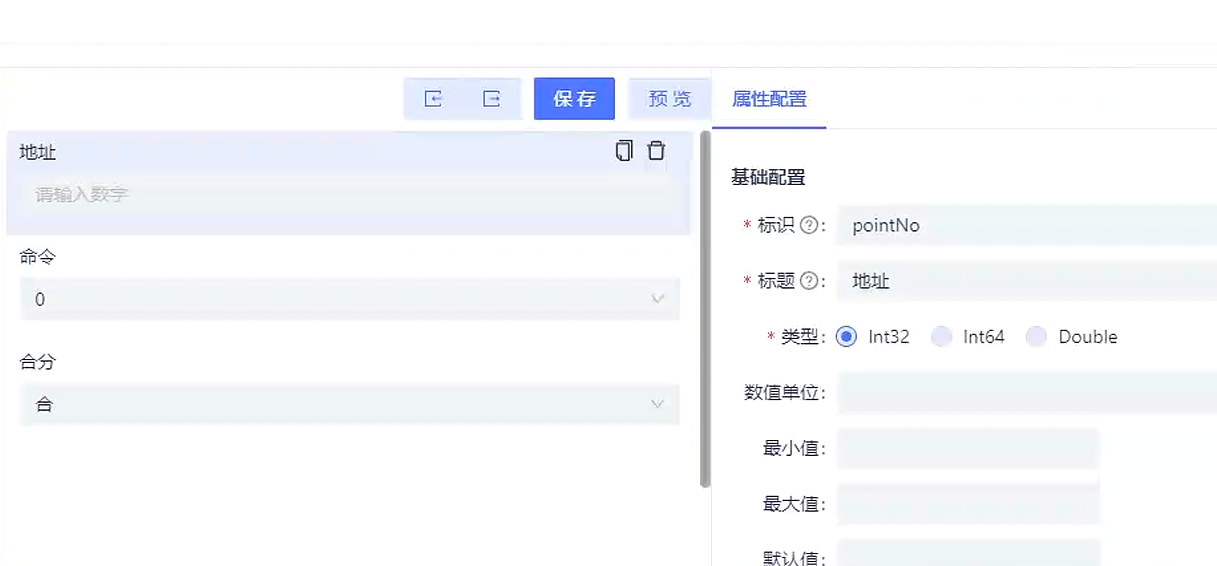
 在模型里通过调试进行下发指令:
在模型里通过调试进行下发指令:
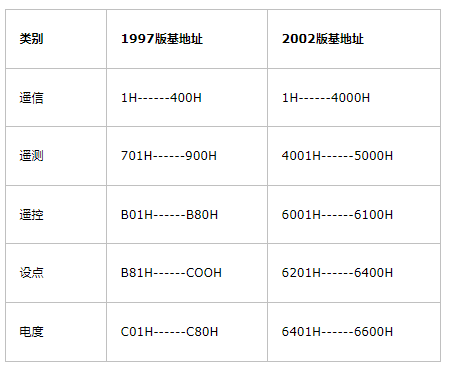 注意:遥控的地址=XXXX-24577(6001H),也就是从0开始填写偏移地址。
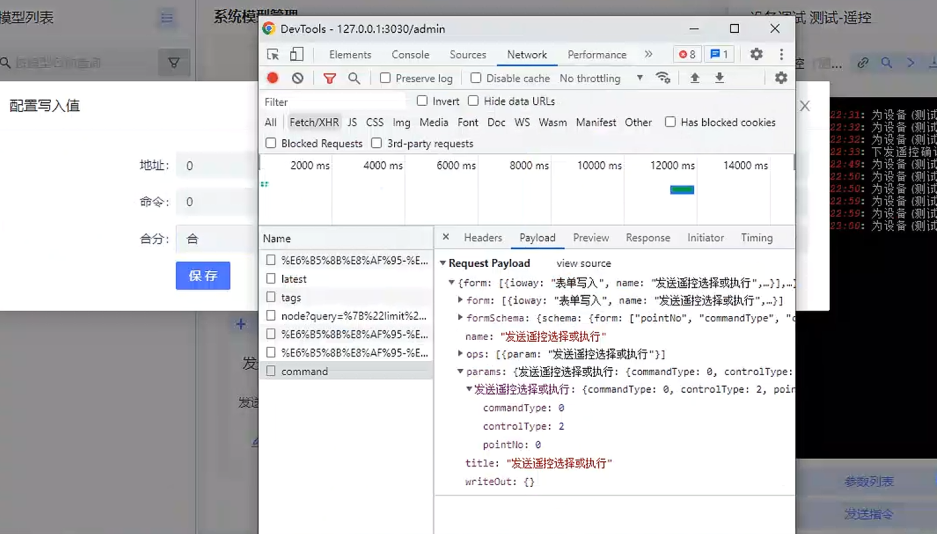
通过按F12,查看下发的指令格式。
注意:遥控的地址=XXXX-24577(6001H),也就是从0开始填写偏移地址。
通过按F12,查看下发的指令格式。
 接收到的报文
接收到的报文

3.发送遥控撤销
{
"name": "发送遥控撤销",
"params": {
"pointNo": 1,
"commandType": 1,
"controlType": 0
}
}
4.升降遥控
{
"name": "升降遥控",
"params": {
"pointNo": 1,
"commandType": 1,
"controlType": 0
}
}
5.读取指令
{
"name": "读取指令",
"params": {
"pointNoList": [1,2,3]
}
}
6.标度化设定值
{
"name": "标度化设定值",
"params": {
"deviceValueItems": [{"pointNo":1,"value":2}]
}
}
7.归一化设定值
{
"name": "归一化设定值",
"params": {
"deviceValueItems": [{"pointNo":1,"value":2}]
}
}
8.复位进程
{
"name": "复位进程",
"params": {
"QRP": 1
}
}
QRP QRP为复位进程命令限定词。0为未采用,1为进程的总复位,2为复位事件缓冲区等待处理的带时标的信息,3~127为兼容范围保留,128~255为专用范围保留
9.测试命令
{
"name": "测试命令"
}
10.短浮点数设定值
{
"name": "短浮点数设定值",
"params": {
"deviceFloat32ValueItem": [{"pointNo":1,"value":2.1}]
}
}
若有收获,就点个赞吧